Contents
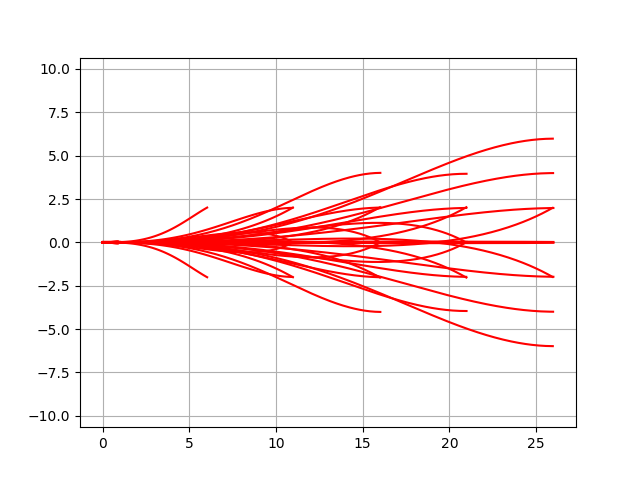
This is a path optimization sample on model predictive trajectory generator.
This algorithm is used for state lattice planner.
Ref:
Optimal rough terrain trajectory generation for wheeled mobile robots